引言
作者:托马斯·莱伯博士(LSP Innovative Automotive Systems GmbH 创始人);安东·范·赞滕博士(IPGATE AG 顾问)。2025年3月21日。
自1978年、1986年和1995年ABS、ASR和ESC相继问世以来,基于回流原理的制动压力调节系统已逐渐普及。 阀块、电动机、泵、8 个或 12 个电磁阀、蓄能室以及后来在 ESC 中的压力传感器和电子控制单元 (ECU) 组合在一个单元中,并安装在发动机舱内,与制动助力器分开 [1、2]。 早在 1980 年代,将制动助力和压力调节集成在一起的概念就已经面世(例如 MK II、ABS 3),但由于成本原因未能被市场接受。
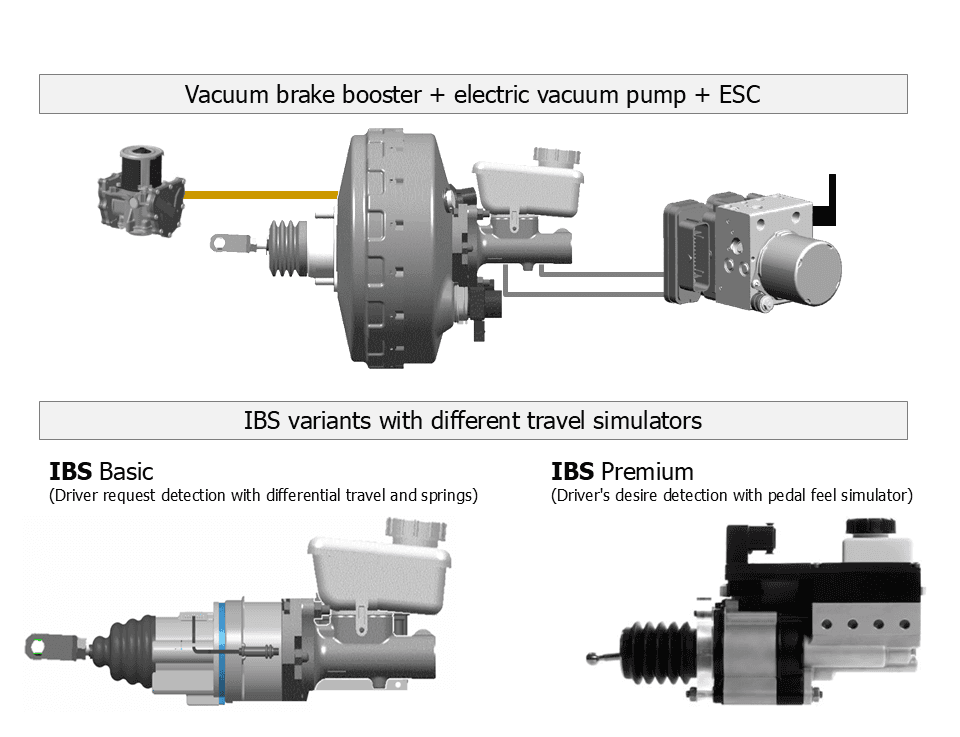
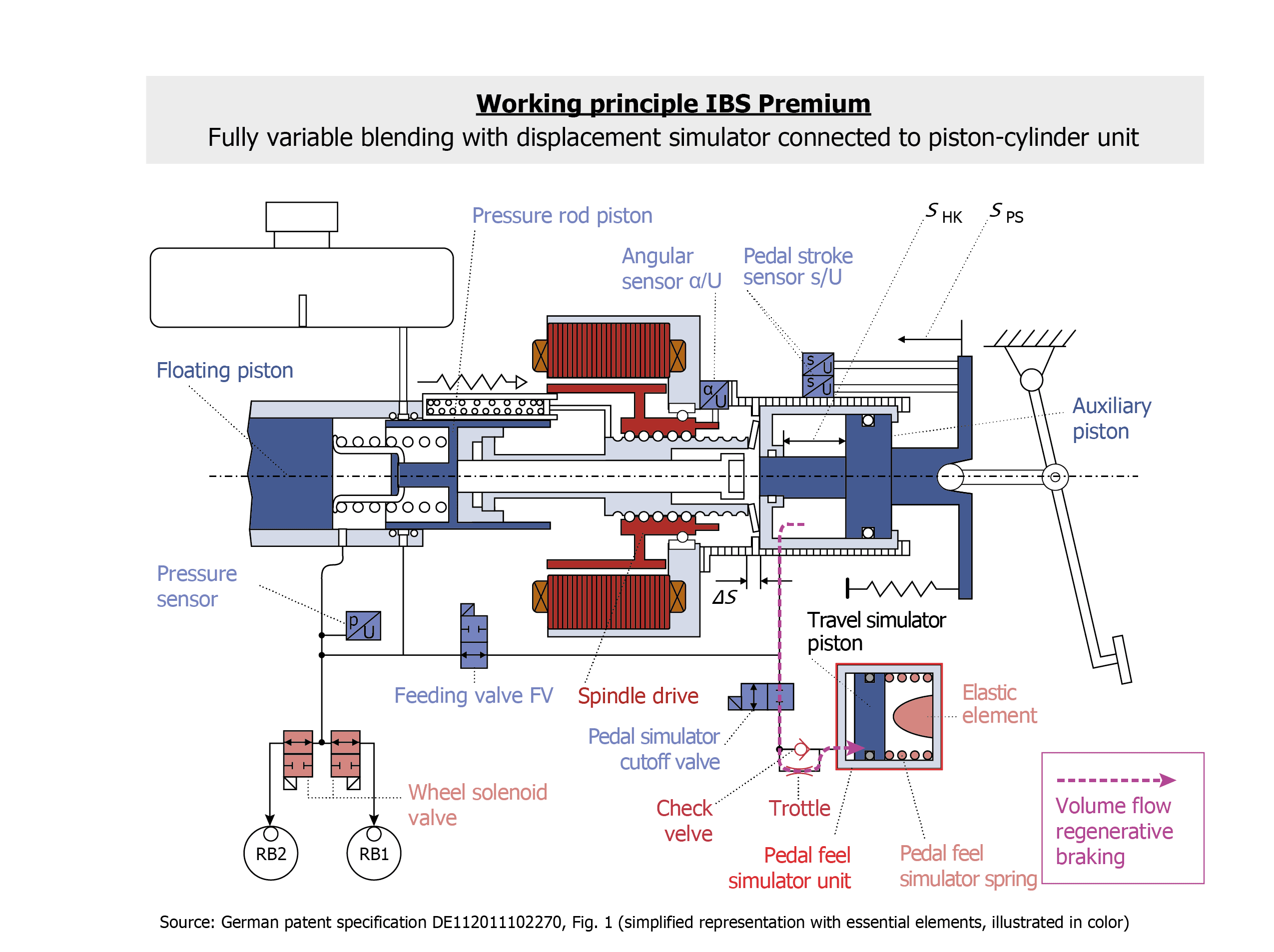
21世纪初,随着汽油发动机的优化以及混合动力和电动汽车的开发,首次出现了对电动真空泵的需求。传统制动系统带来的额外成本,促使人们提出了集成制动系统这一新概念,该系统采用非液压传动方式,并具备按需供电的制动助力(e-BKV)和压力调节(ABS/ESC功能)。 2005年至2009年间,IPGATE AG与LSP Innovative Automotive Systems GmbH两家公司开发了两种基于集成制动系统(IBS)技术的变体,它们配备了不同的行程模拟器(分别称为“IBS Basic”和“IBS Premium”),并向多家占据显著市场份额的制动系统制造商授予了许可。 图1初步概述了该技术在结构体积和安装工作量方面与配备电动真空泵和ESC的真空制动助力器相比所取得的显著进步[3]。
在此过程中,IBS早在2009年就已满足了未来半自动驾驶(也称为“SAE 2级”)制动系统的所有要求。 随着一款兼具强劲动力与高动态性能的电动机的推出,也为新的工作原理和主要功能奠定了基础,例如自动紧急制动功能(AEB),其特点是在约 150 毫秒内将制动力矩迅速提升至车轮锁止压力(业内称为“锁止时间”或“TTL”)。
PPC 方法
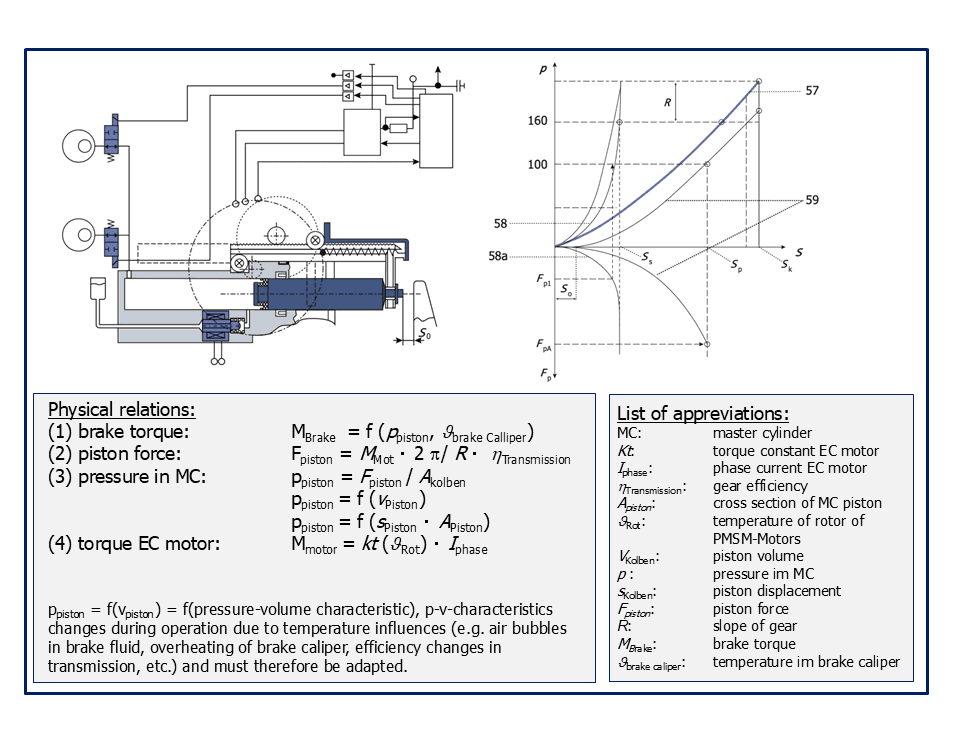
PPC控制系统的核心 (PPC:活塞压力控制)的核心是一台采用稀土永磁体的永磁励磁无刷电子换向内转子电机(简称PMSM内转子电机或高动态EC电机),该电机通过机械齿轮(齿条或主轴驱动)驱动串联主制动缸(TMC)的压力杆活塞,从而在两个制动回路BK1和BK2中产生压力。 该高动态 EC 电机为三相电机,采用正弦换向,配备电流传感器 i/U 以及转子角度编码器 /U,并通过微控制器由三相整流器(即由六个功率半导体器件和星形连接组成的所谓 B6 桥式电路)进行控制。 通过微控制器进行控制,可实现基于 d 和 q 向量的矢量电流控制(称为 Id/Iq 电流控制),其中 q 向量代表转矩,d 向量代表磁通密度。
通过采用矢量控制,与采用块换向的直流电机相比,无刷电机(EC)在脉冲功率运行模式下,可通过弱磁控制(Id电流控制)显著提升性能。 由于转子角度编码器具有众所周知的高分辨率,以及 EC 电机与推杆活塞之间的大传动比,因此可以对 TMC 的推杆活塞进行微米级的位置测定,并非常精确地计算活塞的速度。 对于制动助力功能,在已知传动效率的情况下,也可以进行 Id 电流控制。为了实现这一点,通过压力传感器 (p/U) 确定压力与产生扭矩的电流 Iq 之间的关系,并在运行期间定期进行调整,以便应用 p=f(Iq) 映射。压力传感器 (p/U) 还用于确定压力体积特性曲线或压力活塞行程特性曲线。
通过采用上述传感器技术以及基于模型的软件架构,可利用物理关系实现开环控制和闭环控制。控制器在外层控制环路中与压力控制器和/或活塞位置控制器级联,而在最内层控制环路中则采用EC电机的Id/Iq电流控制。此外,在外层和内层控制环路之间还集成了一个执行器速度控制器。 自适应映射(例如推杆活塞的压力-位移特性)可用于动态压力变化时的预馈控制,或通过活塞位置实现压力控制。电机传感器既用于制动助力,也用于压力调节。
这种控制方式被称为PPC过程(PPC:活塞压力控制)。PPC的基本原理已在众多专利说明书中有所记载,并受到法律保护[5,6,7,8,9]。图2展示了其中最重要的关系。
高动态EC电机
配备真空制动助力器的制动系统对ABS回流泵的电动机并无特殊要求,关键在于其制造成本效益。因此采用了直流电动机。由于真空制动助力器只需产生并静态维持真空,直流电动机完全满足所有要求。制动压力及ABS控制操作所需的上游压力均由主制动缸产生。 直流电机的主要功能是通过出口阀将排入ABS/ESC单元蓄能器腔室的液体回流至主缸。ESC/ABS单元的直流电机还执行某些制动力辅助功能,在技术术语中例如称为“HBA(液压制动辅助)”、“HBB(液压制动助力)”, “HBC(液压助力失效补偿)”、“HFC(液压衰减补偿)”,以及驾驶员辅助功能(简称“ADAS”),例如AEB(自动紧急制动)。这些功能是根据ESC/ABS单元直流电机的性能规定的,且仅支持动态范围有限的紧急制动。
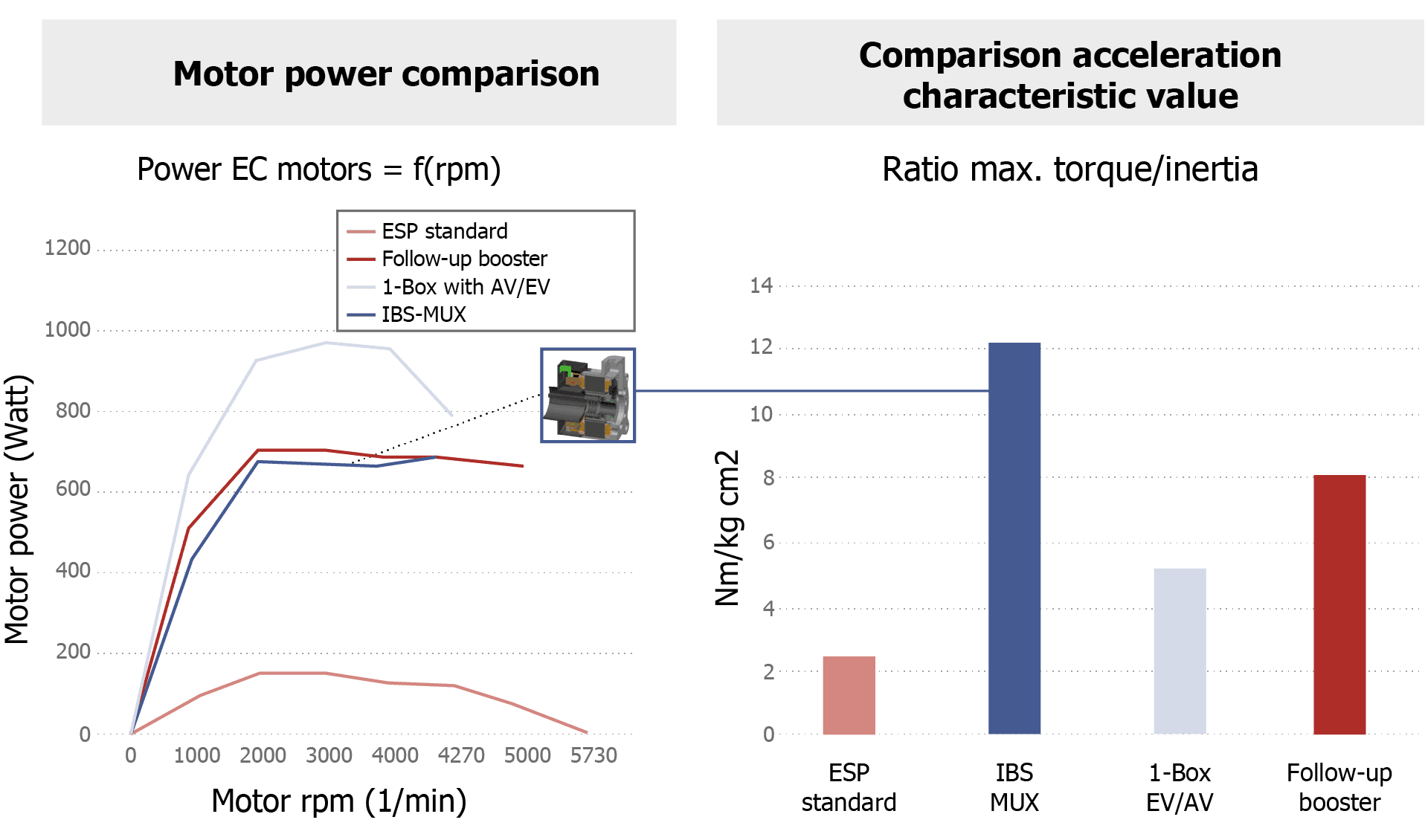
作为IBS技术的实现基础,一种高动态性能的EC电机[4]——即峰值功率约为700瓦的稀土无刷内转子电机[5,6,7,8,9]——于2004年首次问世,其功率较标准ESC单元中的直流电机提高了约4倍; 此外,一旦达到最大功率,即使在更高的电机转速下,也能通过磁场定向矢量控制将功率保持恒定。 12V车载电源的性能得到了最大程度的利用。此外,两种IBS变体的电动机动态响应能力提高了约5倍。为表征EC电动机的动态特性,将加速度参数M/Θmax(即EC电动机最大转矩Mmax与运动部件惯性质量Θ之比)进行了简化,并称之为IBS技术的时常数。
图3展示了标准ESC系统(ESC Standard)、采用多路复用控制的IBS技术(IBS MUX)以及典型单箱式制动系统(单箱式制动系统的特点是将制动助力、压力调节以及执行机构的功能集成于一个单元中; 而双箱式制动系统的特点则是将制动力增强与执行机构的功能划分在第一单元,压力调节功能则位于第二单元)的性能数据及时间常数对比,其中压力调节通过进气阀和出气阀(EV/AV)实现,并配备了具有踏板行程与助力器行程差分控制功能的电动后置制动助力器。 与标准ESC制动系统不同,所有现代制动系统均采用高动态的电换向永磁同步(PMSM)内转子电机,该电机通过微控制器进行磁场定向矢量控制。
在性能对比中,IBS-MUX 与从动式制动助力器相当,但其性能不及一体式制动系统的 EC 电机。 配备EV/AV功能的单箱式电机的最大功率大于从动式制动助力器的最大功率,因为在从动式制动助力器中,驾驶员需通过脚部施力来辅助制动效果。此外,由于压力供应单元与车轮制动器之间的液压流动阻力更大,与IBS-MUX相比,在实现相同的高动态压力建立(TTL)时,从动式制动助力器需要更大的功率。 在加速特性对比中,IBS是动态性能最强的电机,这主要归因于电机动态反转的多路复用要求。电动从动式制动助力器同样采用高动态电机,其动态性能比标准ESC系统的电机高出3倍以上。
驾驶员请求录音
对于经典的真空助力制动器而言,驾驶员感知并非强制要求。原则上,真空助力制动器的阀控功能由被动元件实现,因此助力倍率始终与踏板力成正比[10]。在没有真空的情况下,制动压力必须完全依靠驾驶员的脚部力量产生,而主制动缸的尺寸设计则决定了踏板的脚感。
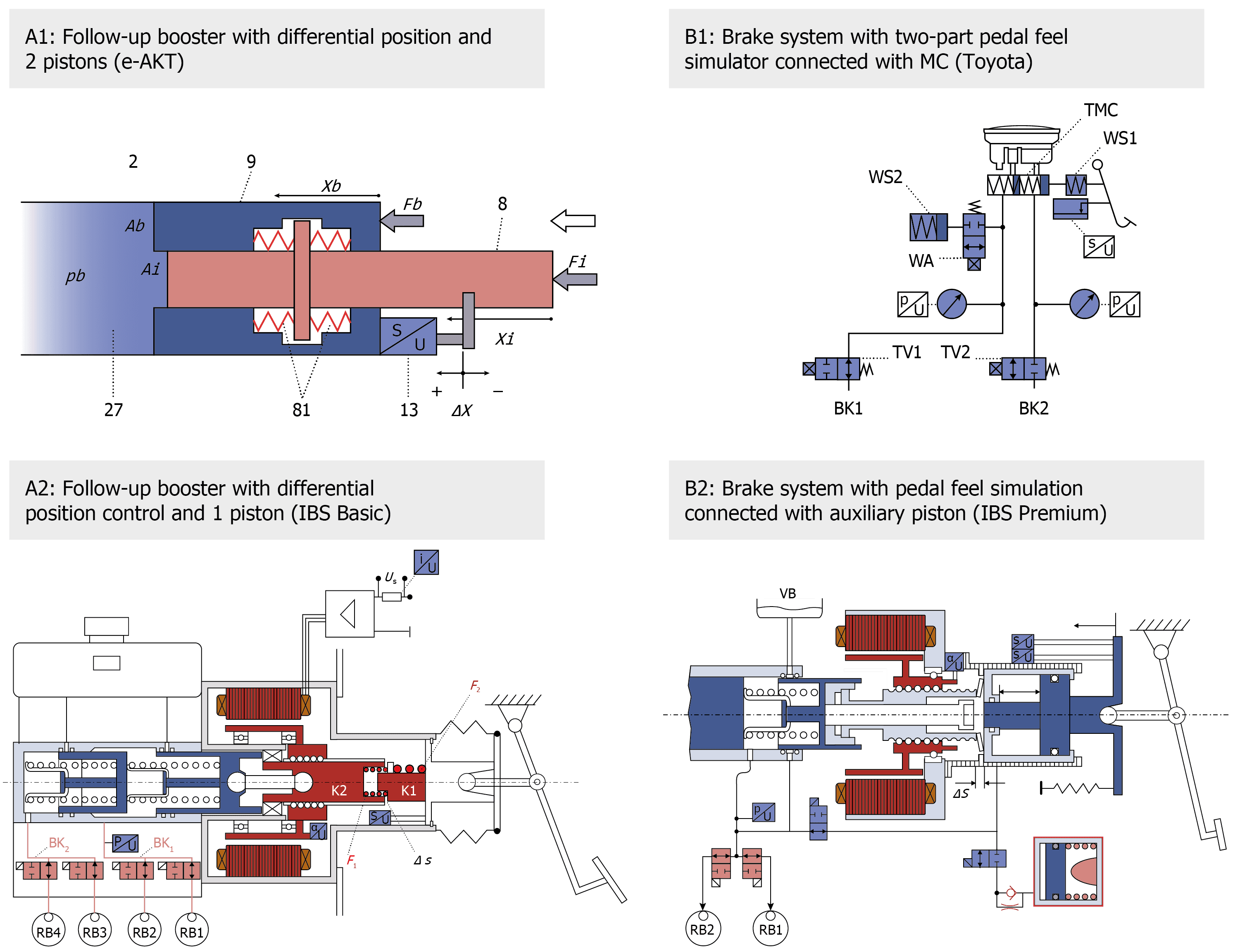
较新的电动制动系统根据两种IBS技术变体——IBS Basic和IBS Premium——分为电动驱动的从动式制动助力器和带踏板触感模拟器的制动助力器(也称为“带液压备用级别的线控制动”)。已确立了两种主要的驾驶员感知工作原理,其具体实现方式如图4所示。A:基于踏板推杆与放大器活塞行程差的驾驶员需求检测。 B:通过传感器(踏板行程、压力传感器和/或力-位移传感器 FDS)以及踏板触感模拟器实现驾驶员感知。
测量原理A1基于两个活塞的位移差测量,这两个活塞产生压力并作用于主缸的主压力腔[13]。该测量原理曾被应用于首款电动系列制动助力器解决方案(即日立汽车系统公司的e-ACT产品),但由于设置两个平行运动的活塞极为复杂,且对密封性有更高的精度要求,目前该方案仅小批量生产。
测量原理 A2 基于作用于制动主缸的两个活塞的差动行程控制,其中第一个活塞 K1 由制动踏板驱动,第二个活塞 K2 由高动态 EC 电机驱动,踏板力与电机力在对推杆活塞的作用力上叠加。 高动态 EC 电机是该测量原理的基本要求,以确保即使驾驶员快速踩下踏板,也能获得良好的踏板感觉。 其特征在于,活塞 K1 与传动装置(活塞 K2)之间还设有空行程 Ds,定义了制动踏板开始操作时的所谓“跳入”阶段。此外,为了在制动踏板和推杆活塞之间映射渐进的弹簧特性,还提供了一系列串联连接的 F1 和 F2 弹簧元件 [14,15]。
测量原理B1基于驾驶员感知技术,采用踏板行程传感器和压力传感器;此外还引入了踏板触感模拟器,该模拟器由第一组件和第二组件组成[16]。 第一套模拟器组件纯属机械结构,而第二套模拟器则连接至主缸。测量原理 B2 基于驾驶员传感系统,该系统配备冗余踏板位移传感器和踏板触感模拟器,后者采用一体式设计,包含多个弹性元件(弹簧和弹性体),以呈现非线性力-位移特性 [17]。
安装在电动汽车(尤其是特斯拉和大众汽车)上的电动辅助制动助力器基于测量原理A2,而市场上配备踏板触感模拟器的电动制动系统则采用测量原理B1,并配备符合测量原理B2的一体式踏板触感模拟器。 在用于自动驾驶的最新型电动制动助力器X-Boost + ESC [18]中,还配备了一个力-位移传感器[19],用于“按钮制动”紧急功能,这样即使活塞被卡住,仍能检测到驾驶员的制动请求并执行制动。
踏板特性
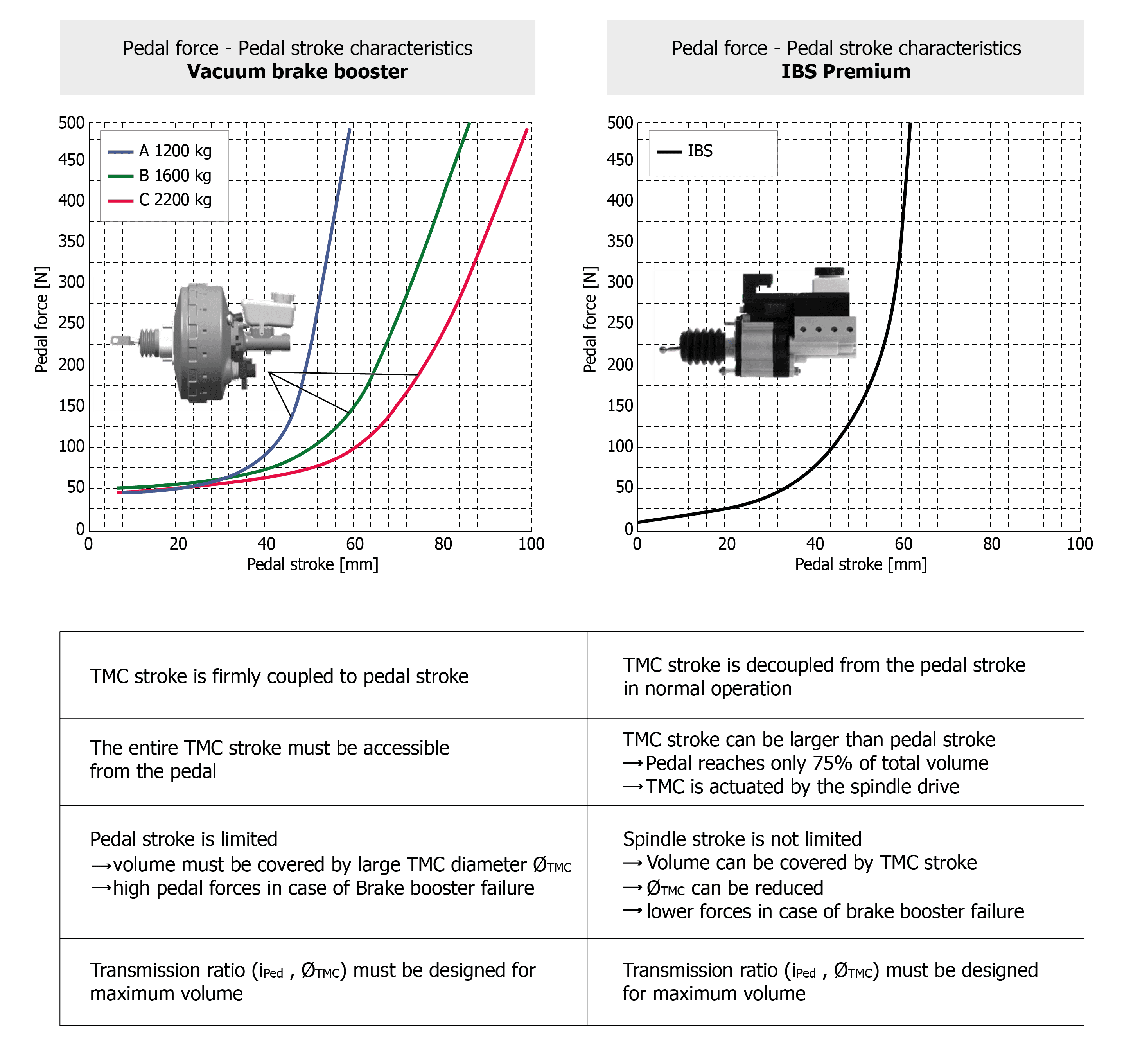
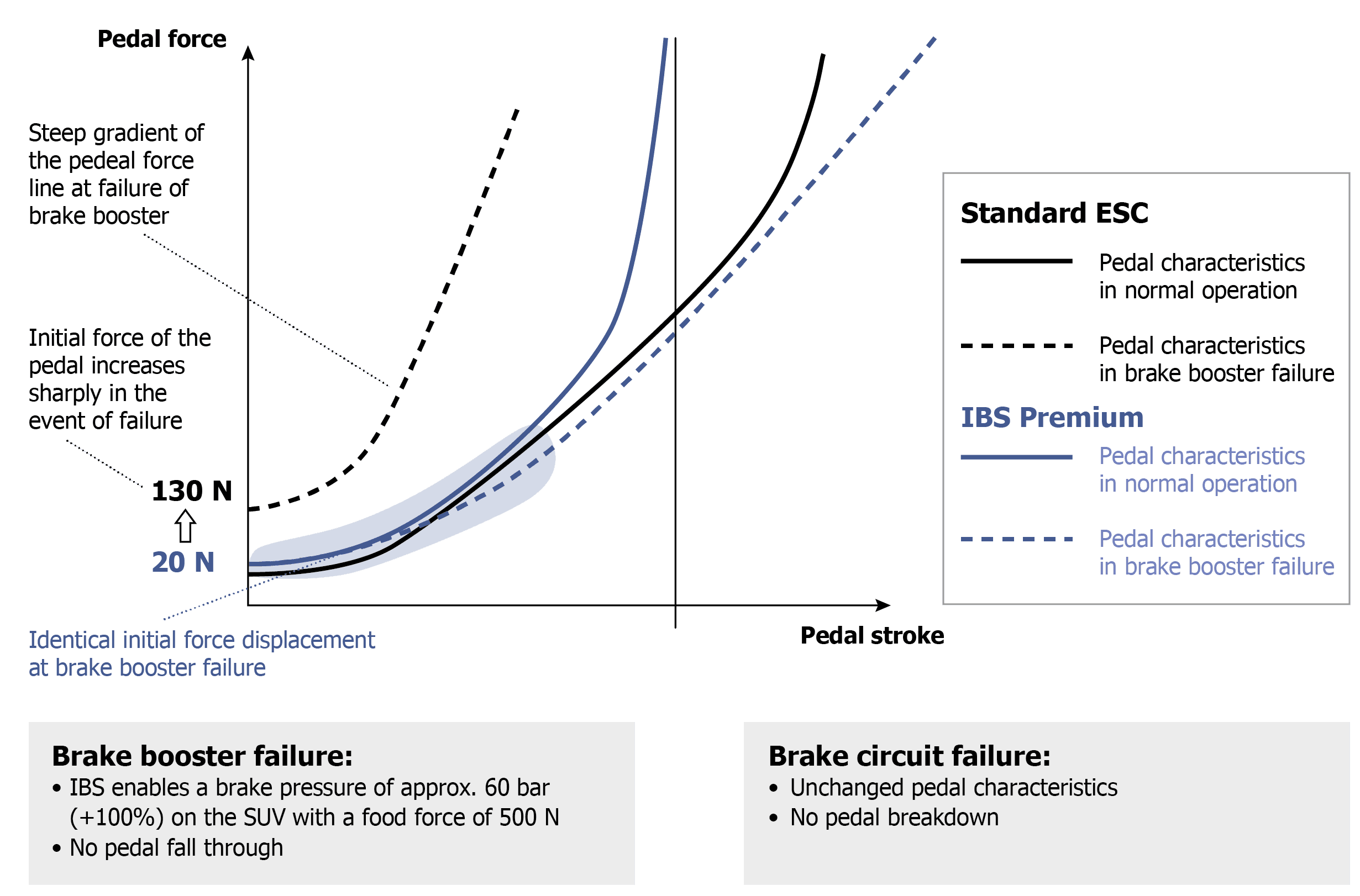
图5左侧展示了当今配备真空制动助力器的车辆的不同踏板特性,这些特性通常取决于车辆重量。其原因是,由于车轮制动缸活塞的接触压力也会随车辆重量的增加而增大,因此驱动车轮制动缸所需的容积通常也会随之增加。在给定的踏板行程、踏板比和容积条件下,这决定了主制动缸的尺寸设计。 图5右侧展示了配备踏板触感模拟器(IBS Premium)的制动系统的典型踏板特性曲线。由于制动助力器在正常运行时与制动踏板行程解耦,且由弹簧与弹性体组合构成,因此该特性曲线可自由调节。由此,踏板触感模拟器可用于设计一种与车辆重量无关的理想踏板特性曲线。
除了正常工作状态下的踏板特性外,还必须考虑BKV故障时的踏板特性(图6)。在TMC的尺寸设计方面,IBS具有将踏板行程与主缸活塞行程解耦这一显著优势。 IBS Premium 充分利用了这种解耦特性,采用了比标准真空制动助力器(23.8 毫米至 26.9 毫米)小得多的 TMC 活塞直径(19.05 毫米),这在制动助力器发生故障时是一个决定性的优势。 这是因为在踏板比 iPed 为 4 且脚踏力为规定的 500 N 时,备选级可达到 50 至 60 bar 的制动压力,从而实现超过 5 m/s² 的减速(联合国/欧洲经济委员会要求:≥2.44 m/s²)。 对于直径为 27 毫米、踏板比 iPed 为 4 且脚踏力为 500 N 的 SUV,与 IBS 相比,只能产生大约一半的制动压力,这意味着仅勉强满足 UN/ECE 要求。
此外,如图6所示,在初始行程范围内,无论真空助力器是否正常工作,IBS的踏板特性几乎完全相同;而对于真空制动助力器,一旦发生故障,初始制动力会显著增加(从20 N增至130 N),且其上升趋势非常陡峭,即驾驶员会感觉到踏板变硬。 这种特性变化与安全密切相关,因为当制动助力器失效时,驾驶员无法对这种情况的变化做好准备。
在配备踏板触感模拟器的制动系统的第一实施例中(图4,实施例B1),制动液从主制动缸的辅助腔室转移至踏板触感模拟器。如果制动过程中位移模拟器发生故障,在备用模式下制动时,原本被转移至位移模拟器的制动液将缺失。 其结果是导致相应制动回路部分失效,并在备用模式下制动效能降低。IBS Premium(图4,实施例B2)通过专门为踏板触感模拟器配备独立的第一活塞-缸体单元(即辅助活塞HK)解决了这一问题。 一旦发生故障,制动踏板将通过机械直连方式直接作用于主制动缸,因此备用制动回路中不会损失制动液量。此外,还可选配或额外配置一个通往行程模拟器的常闭截止阀。
制动助力
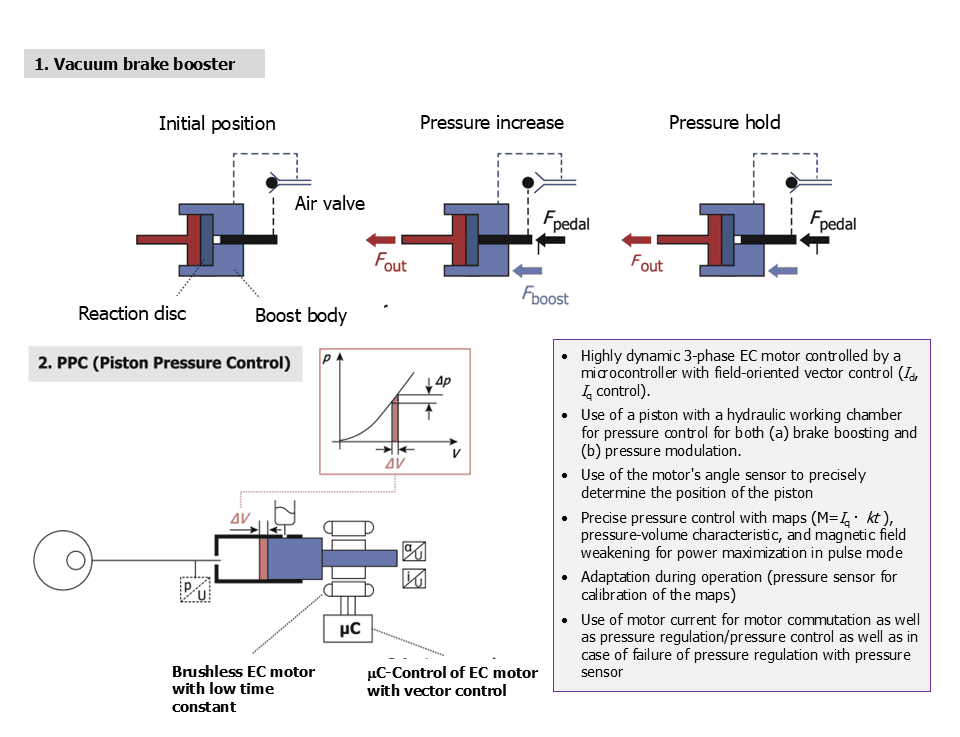
在真空制动助力器(图7,上)中,制动压力会根据踏板力FPed的比例,通过助力力Fboost得到放大。放大倍数由助力器本体面积与踏板推杆面积之比决定。为此,在推杆活塞与助力器本体/踏板挺杆之间设置了一个弹性反应盘。 该放大机构通过踏板推杆与放大器本体之间的行程差自动工作。
在配备踏板触感模拟器的制动系统中(图1、图4、B2),压力供应单元可通过解耦效应,实现独立于踏板操作的运行,从而能够通过软件设置任何制动助力特性(运动模式、舒适模式)。 作为压力源,采用电动机驱动的活塞-气缸单元,简称“柱塞式压力供应单元”。其控制基于PPC控制(活塞压力控制)原理,为清晰起见,图7再次展示了制动助力功能最重要的特征。
压力调节
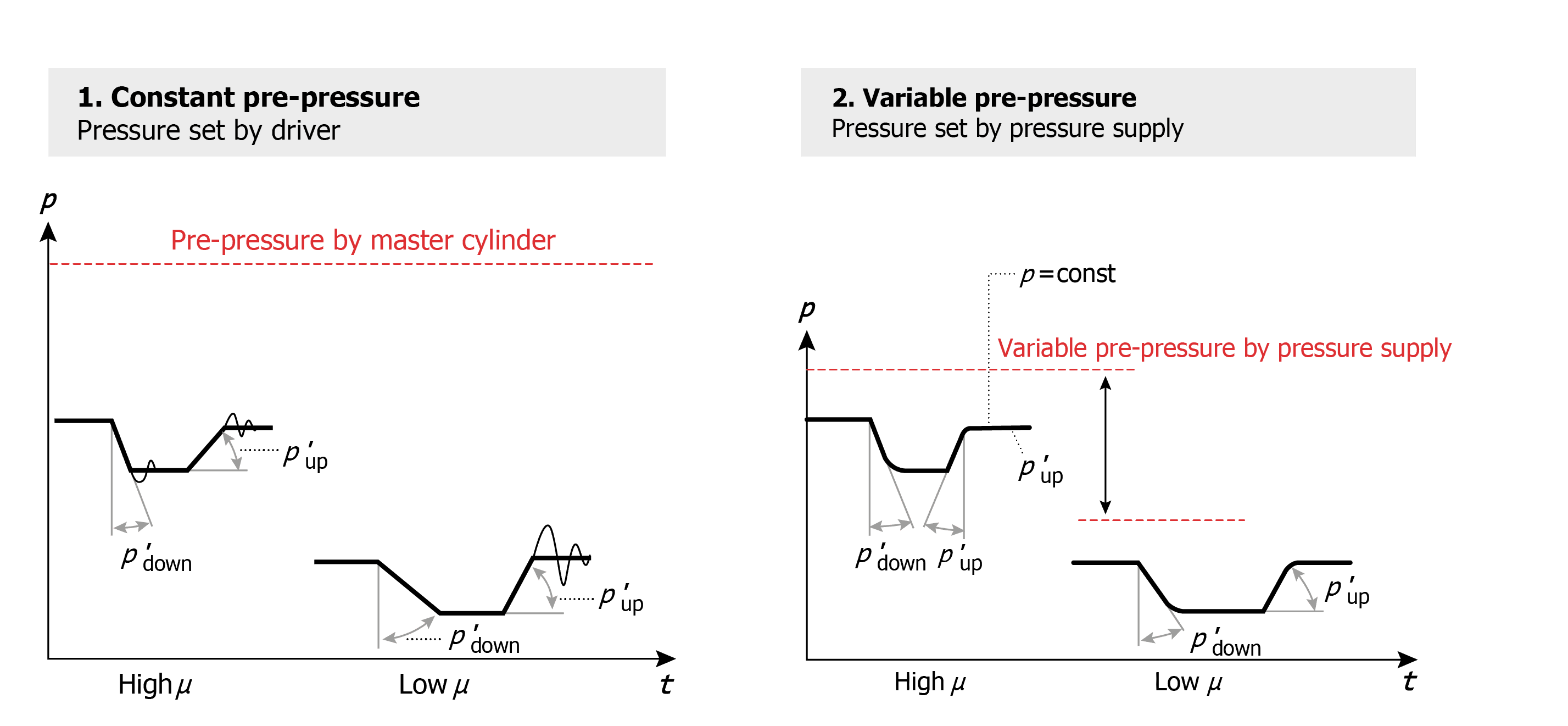
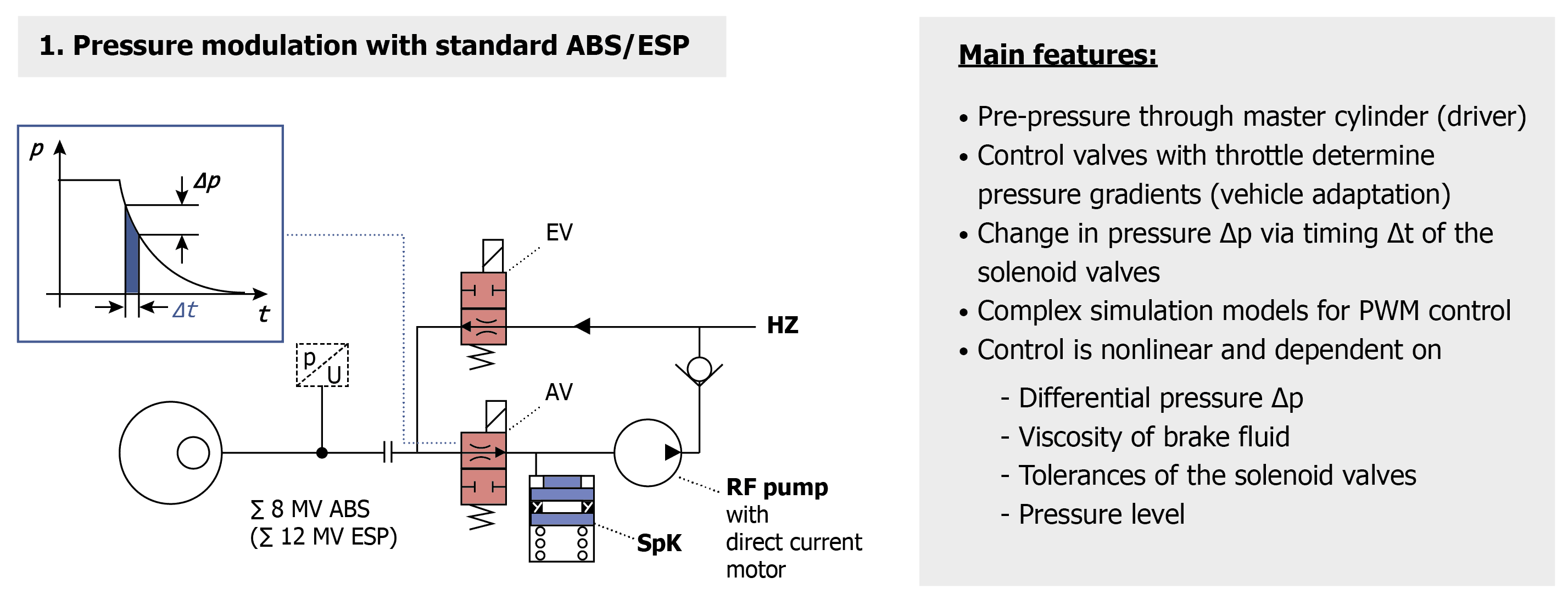
在配备真空制动助力器的标准ABS/ESC系统中,主制动缸设定预压力,并通过电磁控制阀(进气阀和出气阀)实现压力调节。 传统上,每个车轮制动器使用一个进气阀(EV,作为线性电磁阀,LMV)和一个排气阀(AV,作为开关式电磁阀,MV)来调节压力。减压过程中排出的体积由蓄能器腔室吸收,并通过回流泵返回主缸,这与逐渐建立的压力共同导致了人们熟悉的制动踏板脉动现象。
在配备踏板触感模拟器和柱塞供压单元的制动系统中,ABS控制所需的预压力由柱塞供压单元产生。这使得通过进气阀进行压力建立时具有更大的自由度,即可以根据路面摩擦系数调整预压力。将预压力设定为比最高车轮制动压力高约20%是合理的[20]。 采用可变进气压力的压力建立方法,对压力振荡、NVH以及压力建立过程中的设定精度具有积极影响(见图8)。
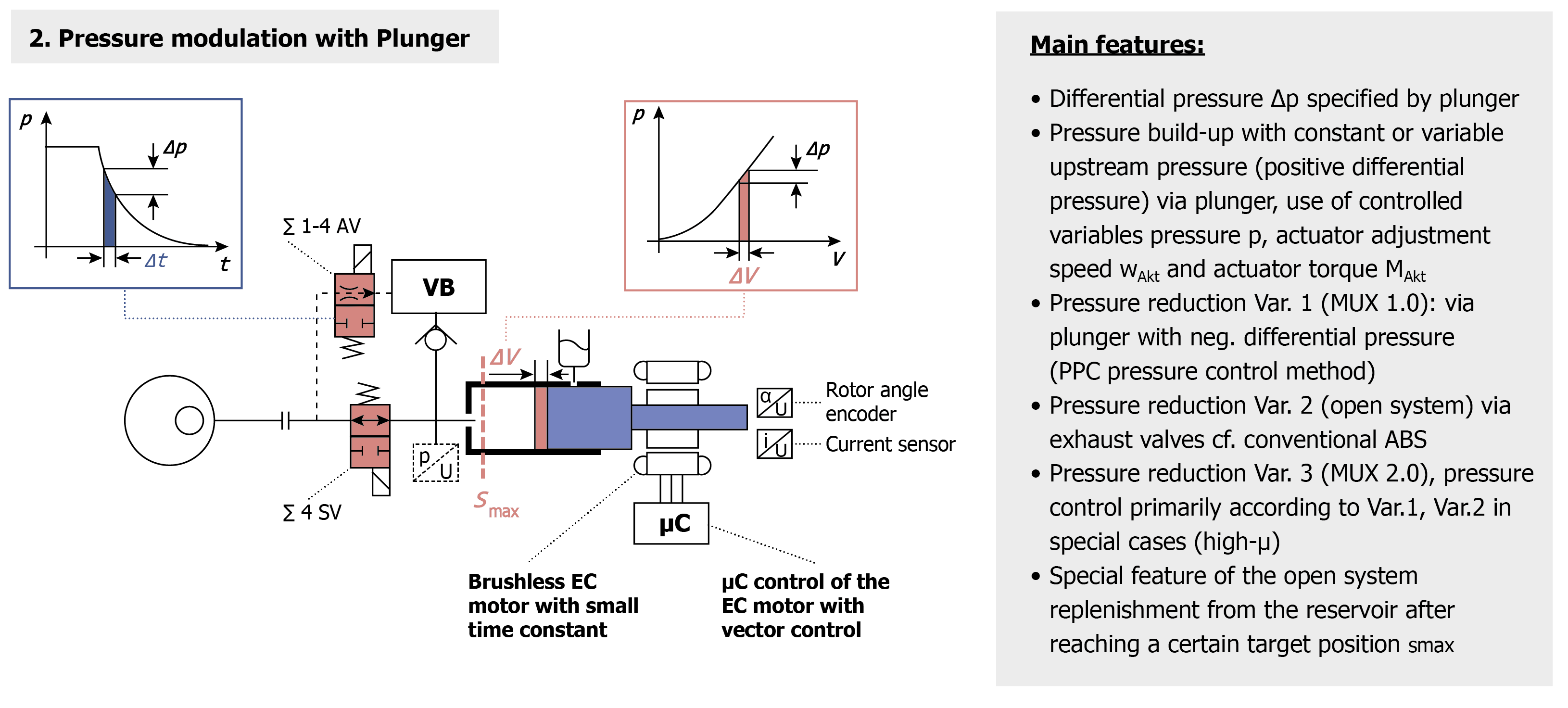
压力释放的方式有两种:一种是通过定时开启通向ESC单元蓄能室的排气阀(闭式制动系统);另一种则是将压力释放至储液罐(开式制动系统),这与博世EHB和丰田的工作原理一致[16, 21]。在丰田的工作原理中,压力通过两台泵建立,这两台泵在不同的压力水平下工作。在开式系统的进一步发展中,引入了柱塞式供压单元 [22]。除压力p作为被控变量外,该压力控制方法还在级联控制器中采用了执行器速度wAktor和执行器扭矩MAktor作为被控变量[23]。级联控制器实现了动态压力控制,其优势在于:即使通过排气阀将压力释放至储液罐导致容积损失,在控制模式下仍能保持预压力恒定。 在闭环双箱制动系统中,一种包含加速度和速度分量的动态控制级联(在VDA 360指南[24]中称为PRL函数)也至关重要,因为与真空制动助力器相比,这类系统的液压弹性系数极低。
在 IBS Premium 中,通过双向有效切换阀(SV)引入了带增压和减压功能的压力控制方法,其中减压过程以最简单的压力调节形式进行控制,无需切换电磁阀,而是使供压活塞后退一定距离 s,从而以较低的电流驱动 EC 电机。 如果在运行过程中调整了压力-容积特性,即使压力-容积特性发生变化(例如由于制动液中的气泡或车轮制动器的变化),目标压力设定值仍能可靠地保持。
最简单的ABS压力控制形式是所谓的“节律制动”,该方式不使用车轮速度传感器,也不驱动控制阀,而是通过使电动机往复运转,或在两个不同的电流水平之间切换,来调节制动压力,从而防止车轮永久抱死。 这种基础的ABS控制作为驾驶稳定性功能,被引入到电动后续制动助力器[25]中,以应对ESC单元发生故障的情况;但由于缺乏EBD功能,其减速能力仅限于5.8 m/s²。
在多通道ABS运行中,系统会读取车轮速度传感器数据,并主动开启或关闭电磁阀。在IBS系统中,引入了优先级控制——即所谓的复用法(MUX法)——该方法结合了PPC法和额外的电磁阀控制。MUX控制决定了减压过程是在一个或多个车轮制动器中依次进行[26],还是(部分)同时进行[27]。 在第一代MUX控制(MUX 1.0)中,减压完全通过切换阀(SV)实现;在第二代中,减压既通过切换阀SV实现,又在临界情况下通过排气阀实现,此时制动回路会向储液罐放气。这种结合活塞和排气阀进行减压的混合方案被命名为MUX 2.0过程[28]。 图9展示了采用泵/压力流体蓄能室与柱塞供压单元时,不同压力调节原理的对比。
ABS/ESC系统与真空制动助力器的优缺点:这种组合的最大优势在于采用了封闭式液压系统,该系统40多年来已被证明是可靠的。其主要缺点是应用复杂,因为压力调节操作实际上仅通过流量估算模型来确定车轮制动器的压力。此外,通过时间控制实现的减压精度无法达到采用PPC方法减压时的水平。
PPC/MUX 调压技术的优缺点:采用 PPC 工艺进行压力调压的优势在于,在压力建立过程中可以非常精确地设定预压力,并且还可以根据路面摩擦系数进行调整。其缺点在于,在减压和补压过程中,由于体积损失会导致液压系统打开,在控制操作期间,污垢颗粒可能会通过压力供应管路进入阀门 [29]。 MUX 2.0 工艺显著降低了对 EC 电机在压力调节方面的动态要求,并且仅在特殊情况下才会短暂打开制动回路,实际上使其具备了封闭式制动系统的安全优势。
ABS控制结果:MUX 1.0 流程
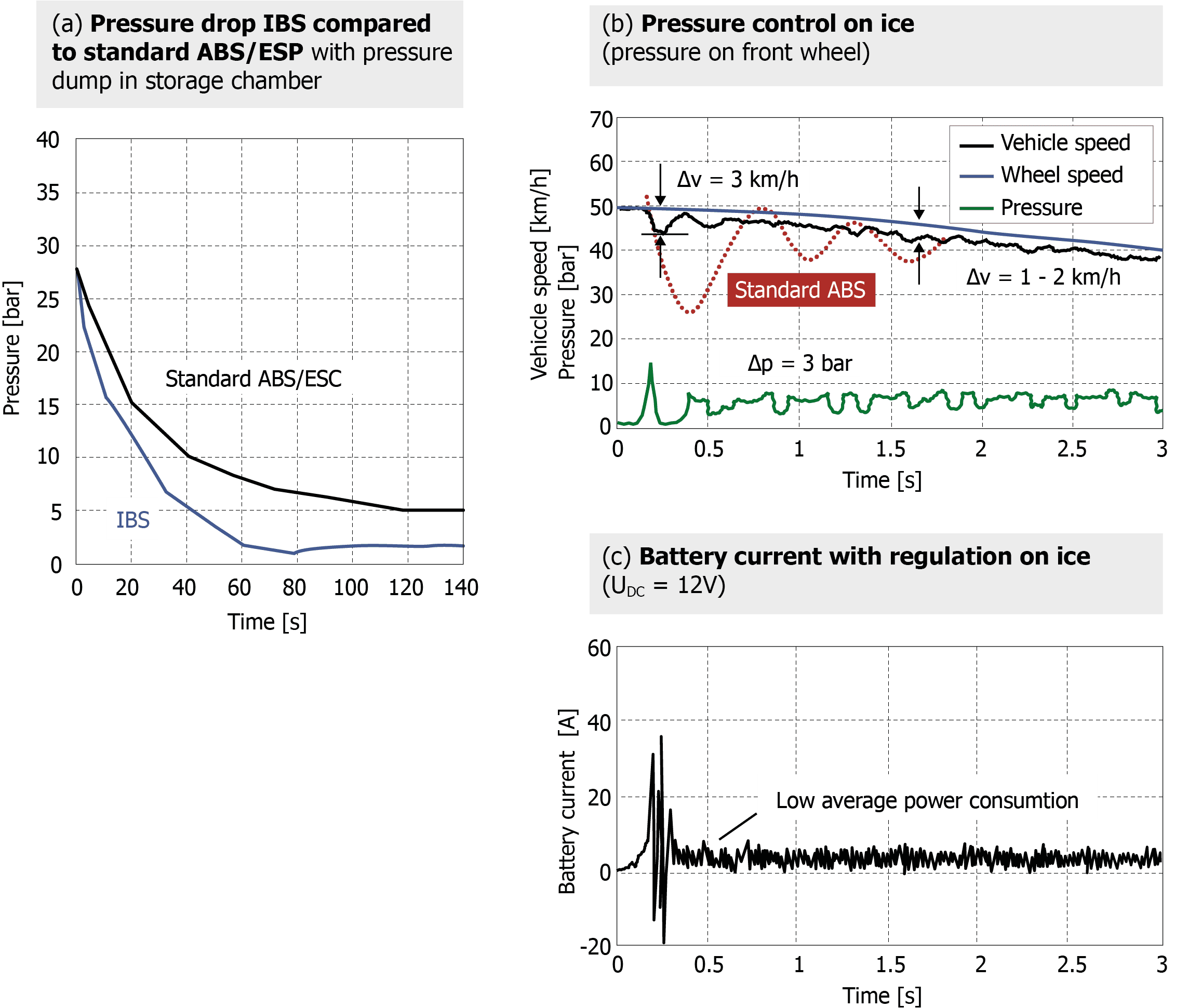
IBS系统中切换阀的低节流效应,使得在低摩擦系数和低温条件下制动时能够形成较大的减压梯度。 对比结果显示了在冰面上直线制动时的典型减压过程(图10a)。在此过程中,利用再循环系统,IBS在20°C环境下将压力从10 bar降至5 bar的减压时间,较当前的60毫秒缩短了4倍。此外,在控制模式下,IBS的运行噪音明显低于标准ESC系统。
图10b展示了一个IBS前轮控制的示例,在冰面上进行快速直线制动时,多路复用过程采用纯顺序控制,平均锁止压力约为6巴。借助IBS Premium,更高的减压梯度最初仅导致车轮与车辆之间的速度差Δv为3公里/小时。 后续控制序列中,控制偏差Δv进一步缩小至仅1.3公里/小时,对应的压力变化仅为3巴。与传统ABS相比,在雪地、冰面及碎石路面上测得制动距离缩短了高达20%,同时行驶稳定性也得到提升。制动噪音和踏板反馈几乎难以察觉。 目前尚无比这更好的结果,无论是 EMB 还是楔形制动器,它们都不使用制动液,因此不存在低温下的粘度问题。
图10c显示了车辆电气系统的负载情况,该负载与踏板力无关。相比之下,传统ABS系统随着踏板力的增大而消耗的电流也随之增加,最高可达5倍以上。
再生制动混合控制流程
由于真空制动助力器提供的制动力辅助缺乏可变性,因此其适用于再生制动的程度非常有限,且需要额外的组件(分离缸)来模拟反作用力[30]。 在再生制动中,会进行所谓的混合过程,即通过发电机制动力来减小液压制动力矩,从而使液压制动系统产生的减速与混合动力或电动汽车的发电机或发电机驱动的电动机产生的减速相加,达到驾驶员期望的减速效果。
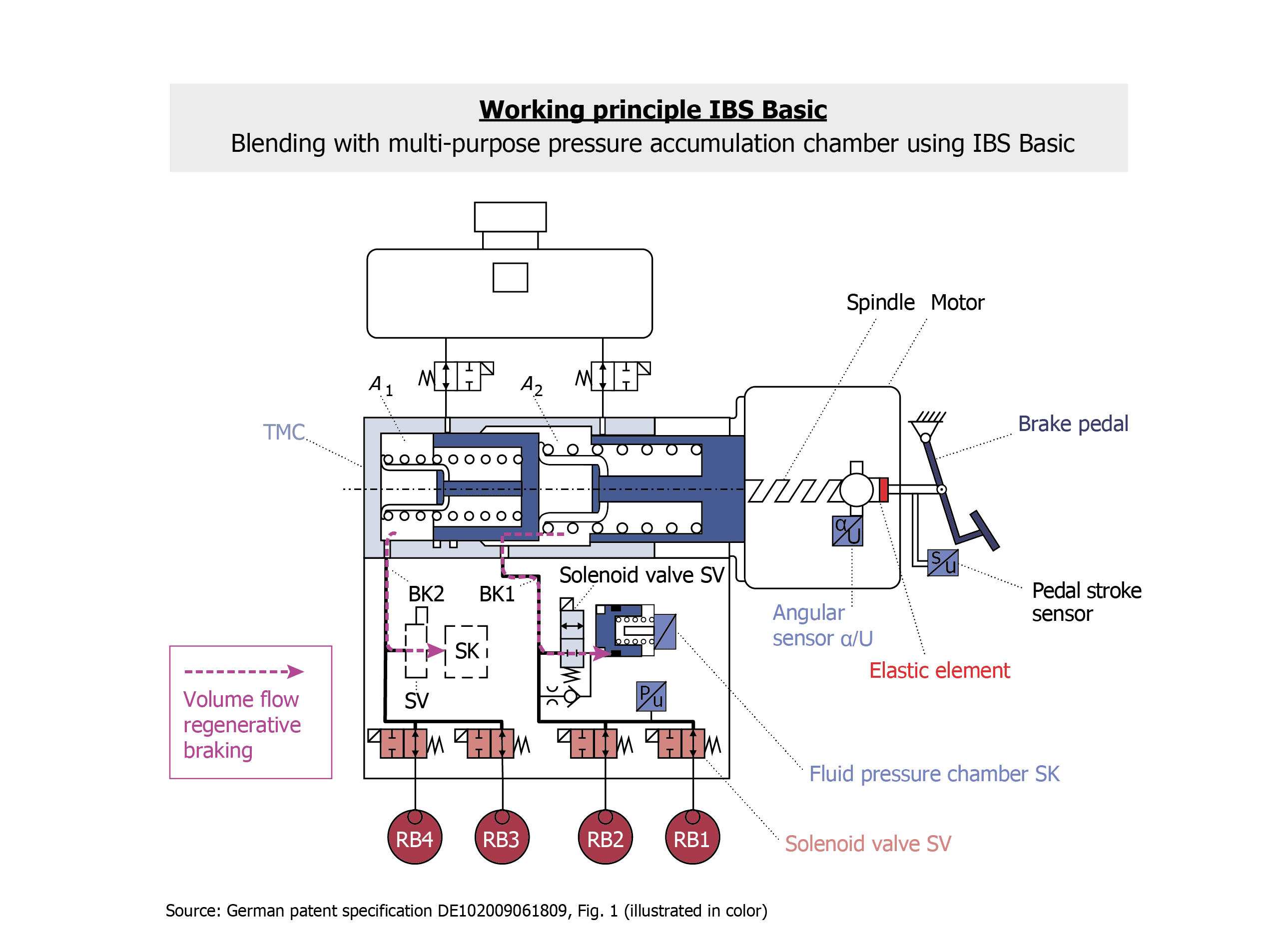
在具有差动行程控制功能的后续制动助力器原理(IBS Basic)中,在主制动缸与轮缸Rz之间的BL连接管路或车轮制动器处,引入了一个带活塞和回位弹簧的多功能液压蓄能室,该蓄能室可通过切换阀启用。 该液压蓄能室通过电磁阀充液,并通过电磁阀或被动元件(节流阀+止回阀)排空,也可用于控制刹车片间隙。当仅施加发电机制动扭矩时,踩下踏板时蓄能室充液,松开踏板时再次排空(图 11)[32]。 图11中,液压体积流量采用颜色编码,作为压力建立的示例。
在当今由电动辅助制动助力器和ESC单元组成的双箱式制动系统中,也可以找到类似的混合解决方案,为此,必须在两个物理上分离的单元之间引入通信接口,以实现双箱式解决方案[33]。 该应用较为复杂,因为在混合制动过程中,必须同时控制连接到蓄能器腔室和两个独立单元中电动制动助力器的电磁阀,以防止驾驶员通过踏板脚感的变化察觉到再生制动的介入。为了确保踏板脚感处于可接受的范围内,需要采用高动态的EC电机以及使用PPC方法进行的高精度压力控制。
在 IBS Premium 系统中(其液压回路图如图 12 所示),制动踏板作用于辅助活塞 HK,该活塞又通过切换阀 WA 与一个由活塞、弹簧和橡胶元件组成的机械液压踏板触感模拟器 (PFS) 相连。图 12 中,液压流量采用颜色编码,以示压力建立过程。 在正常运行中,压力供应单元与执行器单元处于解耦状态;根据驾驶员的请求,液压制动扭矩会通过有效的发电机制动扭矩进行减小。因此,采用PPC控制方法时,混合制动非常容易实现。
自动紧急制动(AEB)
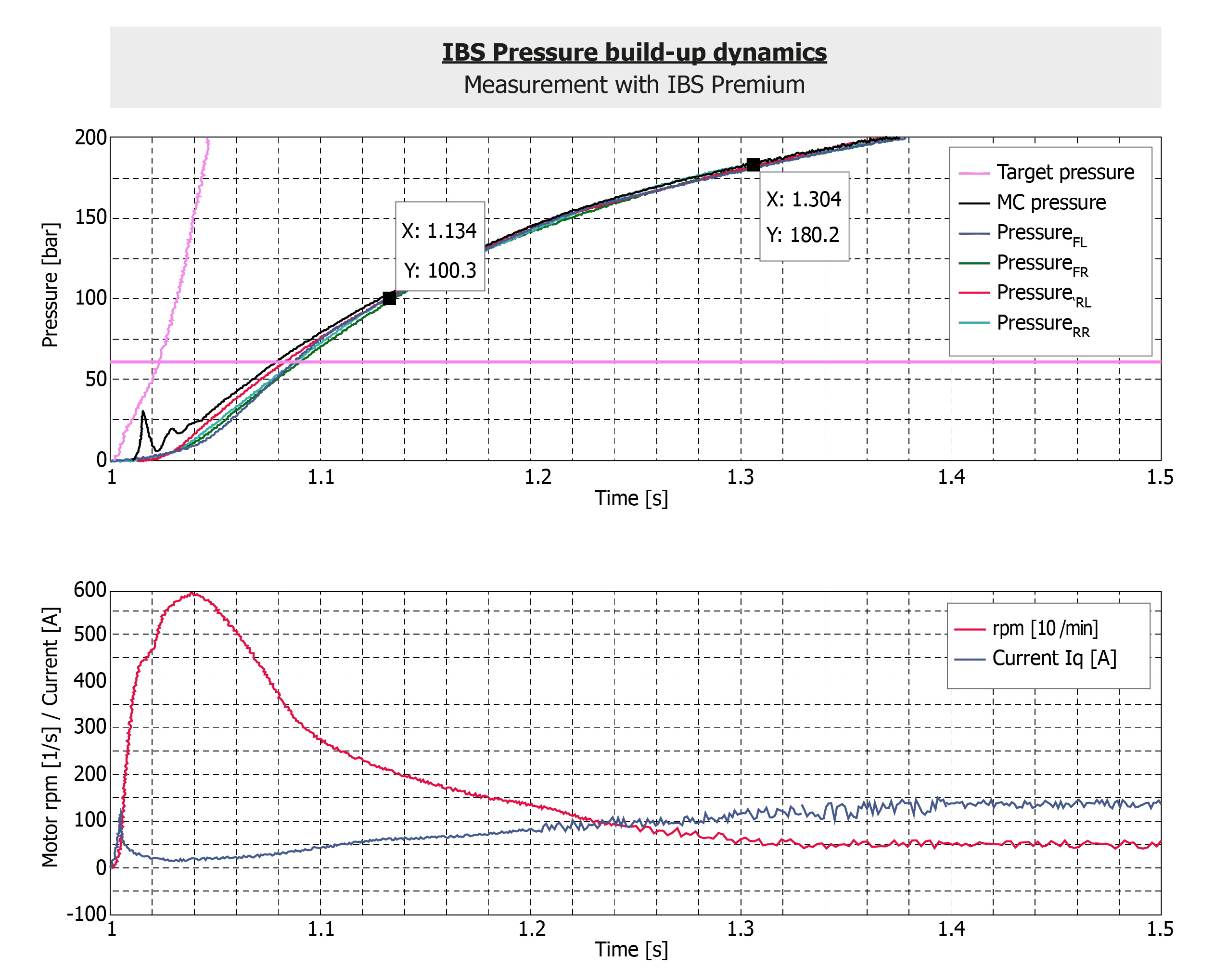
IBS技术还推动了自动紧急制动系统的开创性研发工作,该系统具备极快的制动压力建立速度。随着一款高动态EC电机的引入,该技术于2006年6月首次向大陆集团(Continental AG)进行了展示。 如图 13 所示,IBS 技术和 PPC 工艺使电机在 30 毫秒内达到 5000 转/分钟以上的转速,并且由于阀门的节流损失很小,压力在仅 10 毫秒后就开始上升,并在 134 毫秒内达到 100 巴(TTL=134 毫秒)。
与传统的ESC系统相比,这在动态性能方面实现了质的飞跃。根据该公司自身的测量数据,传统系统从1巴升压至100巴所需的时间约为300毫秒(ESC Premium)至500毫秒(ESC Standard)。 在 2011 年的 Intelligent Brake 会议上,大陆集团展示了首款集成式单箱体制动系统 MK C1 [34] 的仿真结果,其中展示了配备高动态 EC 电机的快速增压对制动距离产生的巨大影响。即使在紧急制动开始时车速仅为 65 公里/小时,制动距离也缩短了 5 米。
降低制动器摩擦损耗的操作步骤
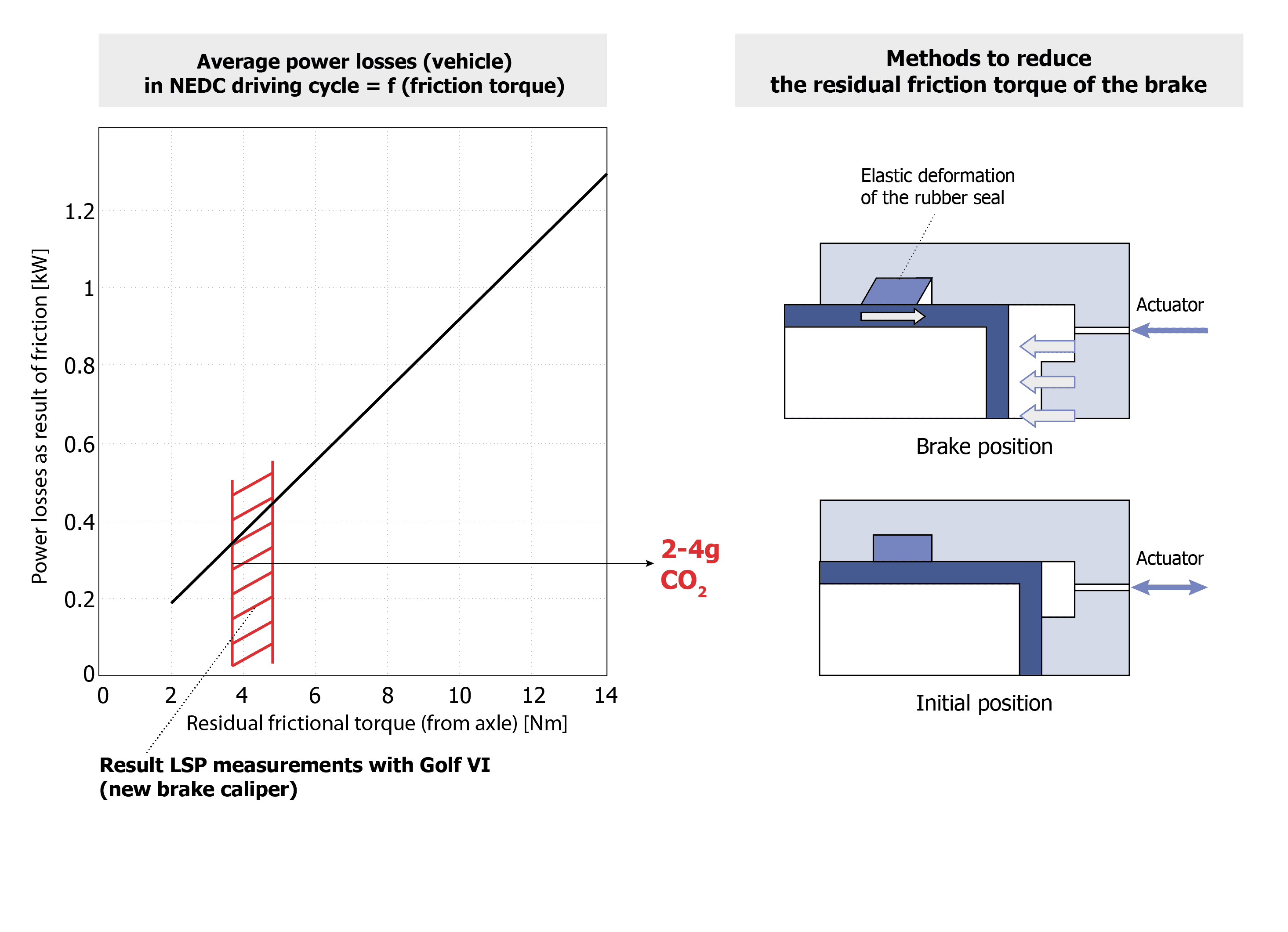
众所周知,在正常情况下(例如未进行急转弯时),刹车片不会完全脱离刹车盘,从而产生不可忽视的残余摩擦扭矩,导致二氧化碳排放量增加。借助IBS系统,通过适当的活塞和阀门控制,可以产生微小的间隙(BLS:刹车片间隙),从而显著降低残余扭矩。 此外,通过在轮缸中设计具有加强回弹功能的制动蹄,也可产生更大的间隙。其缺点是回弹平面上的踏板行程会增加,而IBS Premium系统则不存在这一问题。
作为第二项关键功能,IBS技术致力于大幅降低摩擦制动器的功耗,而2007年的测量数据显示,其功耗仍约为300瓦。 定义了两种变体[29,35]作为BLS工艺,如图14所示:(1) 采用PPC控制方法通过真空主动收回刹车片;(2) 采用PPC控制方法主动调整刹车片间隙,并使用带强力回弹密封件的卡钳。
真空控制被证明非常有效,但由于可能产生空化效应,其真空度及真空工作时间均受到限制,约为0.5巴。 由于采用电动从动式制动助力器时,驾驶员在踩下踏板时会感觉到间隙,因此配备踏板触感模拟器的制动系统能够有效且轻松地降低制动的残余摩擦。因此,在配备踏板触感模拟器的制动系统中,更倾向于采用方法(2),即在制动操作开始前适时施加制动片,从而确保无法察觉制动效果的延迟。
故障安全
在IBS的设计中,重点在于实现故障安全设计。在所有已知的制动系统中,压力调节以降低压力为目的,通常是通过连接蓄能器腔室(如前文提到的ABS和ESC的回流原理)或(在开放式制动系统中)连接至储液罐来打开制动回路。而在IBS中,压力调节是在封闭式制动系统内通过MC活塞实现的。 这意味着制动回路故障检测也能直接进行评估。为此,通过压力传感器信号,将活塞行程与制动系统的压力-容积特性相关联。车轮制动故障检测亦是如此。由于车轮制动压力被测量(如上所述,ABS系统亦是如此),因此在此处,活塞行程也可与每个车轮制动器的压力-容积特性相关联。
如果因液压控制单元(HCU)外部泄漏导致故障,借助IBS技术,系统可关闭通往故障车轮制动缸的切换阀,从而仅依靠三个车轮制动缸(而非四个)继续制动。这大大提高了安全性,因为与仅剩两个车轮制动缸相比,三个车轮制动缸能实现更短的制动距离;此外,横摆率控制仍可进行,尽管其效果有所限制。
利用现有的传感器技术(压力传感器、电机电流、活塞位置)以及电流与压力之间的关联关系,即使个别传感器发生故障,仍可对所有组件进行全面监控。 若行驶模拟器发生故障,系统将切换至电动从动制动助力器。即使在发动机故障的情况下,凭借主制动缸直径为19.05毫米的设计,车辆在备用制动系统中仍能实现较高的减速效果。
开放式制动系统存在许多关键故障源,在许多情况下必须依赖备用方案。市面上的单盒式制动系统得益于小直径TMC所构建的优质备用方案,但由于存在故障问题,它们仍需依赖持续的故障诊断,因此仍局限于SAE 2级自动驾驶。 2017年在一场VDI活动中探讨了这些故障源,并提出了新的智能诊断方法,例如在行驶过程中进行不同测试:停车制动测试(PST)、制动诊断(BED)、停车制动诊断(PSD)以及车辆停车诊断(CSD)[29,30]。
总结与展望
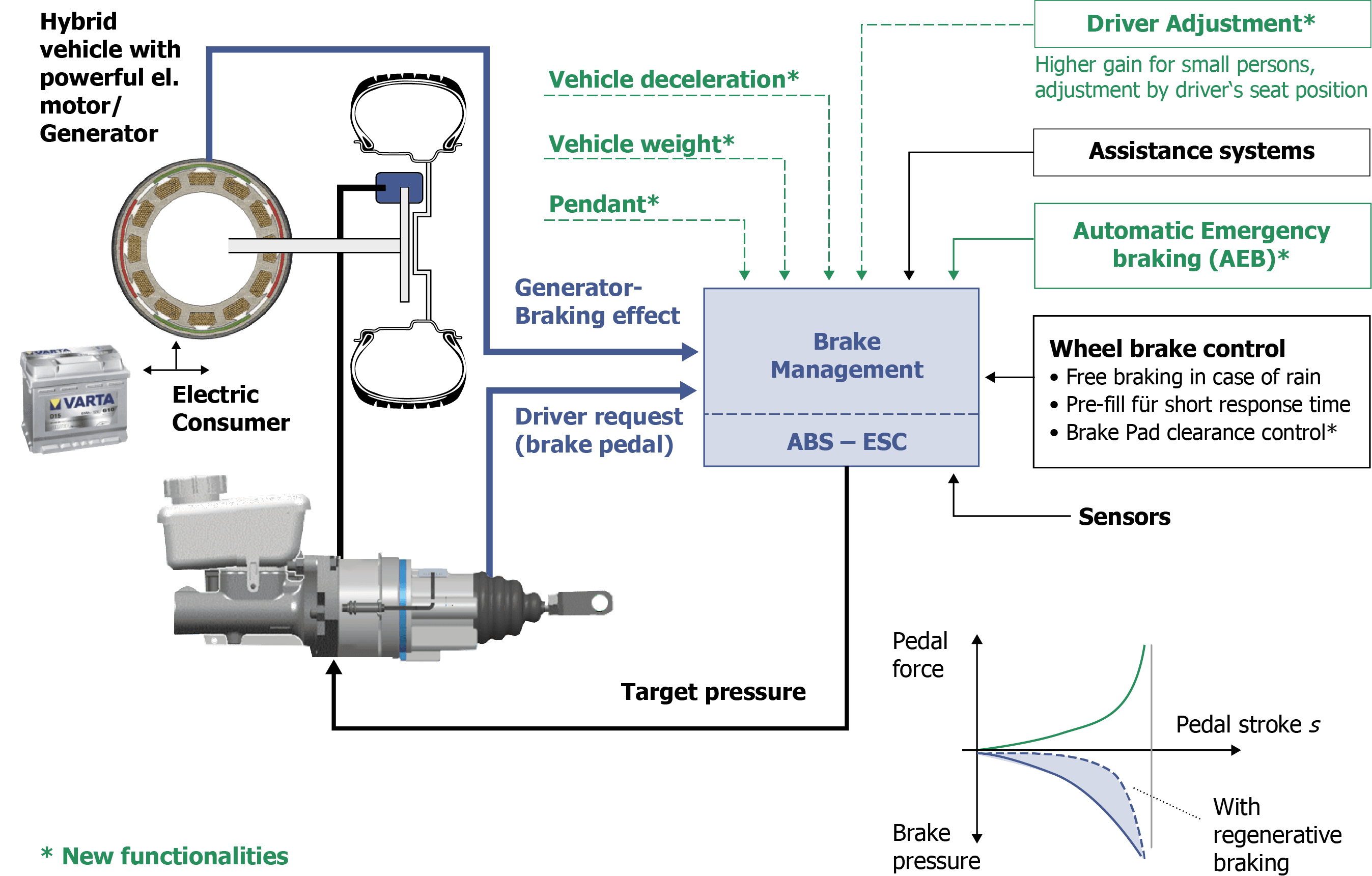
2010年,经过约5年的研发,IBS技术及其制动管理系统首次在一次会议上向公众展示(图15)[3,36]。 除了ESC系统的标准功能范围外,还增加了三项主要新功能:(1) 碰撞前:高动态自动紧急制动(AEB);(2) 与车辆的强力发电机或电动驱动系统进行制动协同;(3) 实现低摩擦或无摩擦制动的方法。
2010年定义的新功能现已被视为标准配置,因为随着混合动力和电动汽车的市场渗透率不断提升,以及符合SAE 2级标准的部分自动驾驶技术的普及,所有核心功能以及新的主要功能都已成为必要条件。
主要功能:IBS Basic
IBS Basic(带差动行程控制的电动助力制动器):制动助力功能下踏板手感良好。在达到一定减速值之前(取决于蓄能室的尺寸设计),可进行再生制动而不影响踏板手感。 驾驶员可通过踏板行程/踏板力与车辆减速率的比值来识别制动状态(例如制动衰减)。制动压力建立速度极快,可满足ADAS功能需求,特别是高性能自动紧急制动系统。
主要功能:IBS Premium
IBS Premium(带踏板触感模拟器的电动助力制动器):踏板行程更短,制动压力建立速度显著加快,以满足ADAS功能需求,特别是高性能自动紧急制动系统。制动初始阶段具有可变的自适应压力跃升(针对各车型系列进行优化)。在制动助力失效时提供更优的备用制动性能(几乎保持熟悉的踏板特性,且在相同踏板力下产生更高压力)。 通过增压实现热衰减补偿,保持踏板特性不变。混合动力及电动汽车的再生制动理论上不受制动系统限制。制动回路故障时踏板仍可正常工作。自动诊断排气状态。压力调节(ABS、ADAS)过程中无踏板脉动,不会干扰驾驶员。压力调节模式下噪音更低,尤其在外部噪音较低时(冰雪路面ABS制动)。
未来发展
2017年和2019年,技术界首次从技术层面深入探讨了未来制动系统在满足自动驾驶故障安全要求方面所面临的挑战[29,37]。 作为面向SAE 3-5级自动驾驶的未来双箱式制动系统套件的首个成员,X-Boost Technology©正在开发中。该技术已于2022年2月通过认证,并作为试点应用搭载于技术要求极高的超跑RIMAC Nevera上,该车拥有约2000马力的电动驱动功率。
随着汽车行业的进一步变革(电动汽车、SAE 3-5级自动驾驶、车辆运动控制),车辆的系统架构以及对制动系统的要求将持续动态变化。鉴于电液制动系统仍具备巨大的、部分尚未开发的创新潜力,且与电磁制动(EMB)相比具有显著的成本优势,未来很长一段时间内,制动系统仍将主要采用液压或部分液压方式。 尽管如此,在提升故障安全性能方面仍需采取行动,以确保电动力制动系统能够达到传统量产真空制动助力器和ESC单元那样的极高可靠性。
文学
[1] Leiber, H.: ABS——独立系统与集成系统的比较。VDI-ATG会议,沃尔夫斯堡,1984年12月
[2] van Zanten, A., Erhardt, R., Pfaff, G.: FDR——博世的车身动态控制系统。《ATZ》 (1994) 11, 第674–689页
[3] Leiber, T., Köglsperger, C., Unterfrauner, V.: 具有集成功能的模块化制动系统。ATZ 2011-06,第466–472页
[4] Leiber, H., Leiber, T.:《永磁励磁旋转磁场电机》,IPGATE AG公司专利申请E81,专利申请号DE102004030063A1,申请日期:2004年6月23日
[5] Leiber, H., Leiber, T.:《采用电动机驱动活塞-气缸系统的制动系统》,IPGATE AG授予的专利E87DE-SA:DE102005018649B4,申请日期:2005年4月21日
[6] Leiber, H., Leiber, T.:IPGATE AG 获得的专利 E87DE-TA1:DE102005063659B3,申请日期:2005年4月21日
[7] Leiber, H., Leiber, T.:IPGATE AG 获得的专利 E87DE-TA4:DE102006063691B3,申请日期:2005年4月21日
[8] Leiber, H., Leiber, T.:IPGATE AG 获得的专利 E87DE-TA5:DE102005063697B4,申请日期:2005年4月21日
[9] Leiber, H., Leiber, T.:IPGATE AG 获得的专利 E87DE-TA6:DE102005063699B4,申请日期:2005年4月21日
[10] 维基百科编辑者。(无日期)。《制动助力器》。维基百科。2025年3月21日检索:https://de.wikipedia.org/wiki/Bremskraftverstärker
[11] 小林健、井上浩:《电动制动助力器》。罗伯特·博世有限公司获授权专利:US6634724B2,日本优先权申请日为2001年4月26日
[12] Witte, B., Barthenheimer, T. 等:大众汽车股份公司(Volkswagen AG)的德国专利申请:DE102005025577A1,申请日期:2005年5月25日
[13] Yamaguchi, T., Obata, T., Oikawa, H.: “制动装置”,日立汽车系统公司的欧洲专利申请 EP1964739A2,日本优先权申请的提交日期:2008年2月27日
[14] Leiber, H., Leiber, T., Unterfrauner, V.: IPGATE AG公司E112专利家族中“无需行程模拟器的制动系统”获授权专利:DE102009004636B4、DE112009005536B3、DE112009005541B3,申请日期:2009年2月3日
[15] Weiberle, R., Jahnz, T., Meyer, J.:《制动助力器及其操作方法和装置》,罗伯特·博世有限公司获授权专利:DE102010001939B4,申请日期:2010年2月15日
[16] Toyota, J., Toyota, A.:《用于最大限度减少制动缸驱动泵装置高负荷运行的制动系统》,丰田股份公司(Toyota AG)的德国专利申请:DE10015810A1,日本优先权申请的提交日期为1999年4月1日
[17] Leiber, H., Unterfrauner, V.:《机动车制动系统的操作装置》,IPGATE AG专利家族E122中已授权的专利:DE112011102270B4, US9878697B2, CN103108785B, DE112011106127B3, US10493967B2,申请日:2010年9月17日
[18] Leiber, T., Leiber, H., van Zanten, A.: “适用于自动驾驶的机电式制动助力器”。《ATZ》2019年第3期,第50-54页,图1
[19] Leiber, H.:《带行程模拟器的执行装置》,IPGATE AG专利家族E123中已获授权的专利:US9541102B2、CN103282251B、KR101804337B1,德国优先权申请的申请日:2010年11月3日
[20] Leiber, H., Leiber, T. 等:《压力调节器控制》,IPGATE AG 获授专利 E90DE-TA1:DE102005063658B3,申请日期:2005年11月21日
[21] Schmidt, G., Binder, J., Winner, H., Gottwick, U.:罗伯特·博世有限公司获授专利:DE198073678,申请日期:1998年2月21日
[22] Roll, G., Böhm, J., Jäger, J.:《电液制动系统的控制方法及电液制动系统》,康蒂纳特股份公司(Continental AG)的欧洲专利说明书:EP2595847B1,申请日:2011年7月13日
[23] Roll, G., Böhm, J.:《用于控制机动车电液制动系统的方法和装置》,Continental AG已获授权专利:EP25800951,申请日期:2010年6月30日
[24] Stringer, S., Spöri, T., Lu, W., Schwab, M., Hägerle, N.: “新型制动系统产品——配备VDA接口,面向未来”,第803页,Function PRL(减压逻辑)。
[25] 博世移动出行解决方案。iBooster:车用机电制动系统。https://www.bosch-mobility-solutions.com/de/loesungen/fahrsicherheit/ibooster/
[26] Leiber, H., Leiber, T.:《压力调节器控制》——IPGATE AG已获授权专利:E87WOEP – EP1907253B1 和 E87WOUS – US8,371,661B2; E90WOEP – EP 1874602 和 E90WOUS – US8,540,324B2,优先权申请的申请日:2005年4月21日
[27] Leiber, H., Leiber, T.:《从不同制动缸压力水平同时或部分同时增加或降低制动缸压力的制动系统》,IPGATE AG专利家族E102的已授权专利:DE102009008944B4、EP2396202B1、 US9211874B2, CN102325676B, IN340432B;申请日:2009年2月13日
[28] Knechtges, C., Knechtges, J., Passmann, A.:《带机电执行器的电液式车辆制动系统及其制动系统的操作方法》,ZF Active Safety GmbH的德国专利申请:DE 102013014188A1,申请日:2013年8月28日
[29] Leiber, T., Köglsperger, C., Hecker, C.:《未来制动系统的挑战与解决方案》,VDI Wissensforum 演讲稿,2017年10月25日。
[30] Leiber, H., van Zanten, A.:《制动系统的诊断方法》,IPGATE AG专利家族E142的已授权专利:US10059321B2、CN107472232B,申请日:2015年4月21日。
[31] Plewnia, H.:《陆地车辆用制动装置》,专利说明书,卢卡斯汽车有限公司:DE102006033890B4,申请日:2006年7月21日
[32] Leiber, H., Leiber, T., Köglsperger, C., Unterfrauner, V.:《带蓄能装置的多功能制动系统》,IPGATE AG 授予的专利 E117DE-TA1:DE102009061809B3,申请日期:2009年9月30日
[33] Vollert, H., Strengert, S., Kunz, M., Kolarsky, J.:罗伯特·博世有限公司获授专利 DE102012211278A1,申请日期:2012年6月29日
[34] Feigel, H.-J., Ross, S., Linkenbach, S.: 《混合动力车辆的制动系统概念》,2011年智能制动会议演讲,IQPC科隆,2011年9月28日演讲
[35] Leiber, H., Unterfrauner, V.:《具有自适应可控衬片间隙的制动系统》,IPGATE AG专利家族E114的已授权专利:EP2225133B1、US8864244B2、CN101945787B,德国优先权申请的申请日:2007年12月21日。
[36] Leiber, T., Köglsperger, C., Unterfrauner, V.: “IBS——集成制动系统”,路德维希堡汽车电子大会,演讲稿,2010年6月10日
[37] Leiber, T., Leiber, H., van Zanten, A.: 《自动驾驶对未来制动系统的影响》,《ATZ》特刊,2019年3月。